Contenido
Introducción
Casi todos los movimientos mecánicos que hacemos ver hoy es logrado por un motor eléctrico. Un motor eléctrico toma energía eléctrica y produce energía mecánica. Los motores eléctricos vienen en varias clasificaciones y tamaños. Algunas aplicaciones de grandes motores eléctricos incluyen ascensores, trenes de laminación y trenes eléctricos. Algunas aplicaciones de pequeños motores eléctricos son robots, automóviles y herramientas eléctricas. Los motores eléctricos se clasifican en dos tipos: motores de CC (corriente continua) y motores de CA (corriente alterna). La función de los motores de CA y CC es la misma, es decir, convertir la energía eléctrica en energía mecánica.
La diferencia básica entre estos dos es la fuente de alimentación que es una fuente de CA para motores de CA y una fuente de CC como una batería para motores de CC. Ambos motores eléctricos de CA y CC constan de un estator que es una parte estacionaria y un rotor que es una parte giratoria o armadura del motor. El principio de funcionamiento de un motor eléctrico se basa en la interacción del campo magnético producido por el estator y la corriente eléctrica que fluye en el rotor para producir velocidad de giro y torque.
Existen diferentes tipos de DC motores y todos trabajan en el mismo principio. Un motor de CC es un actuador electromecánico utilizado para producir un movimiento continuo con velocidad de rotación controlable. Los motores de CC son ideales para usar en aplicaciones donde se requiere control de velocidad y control o posicionamiento del servo.
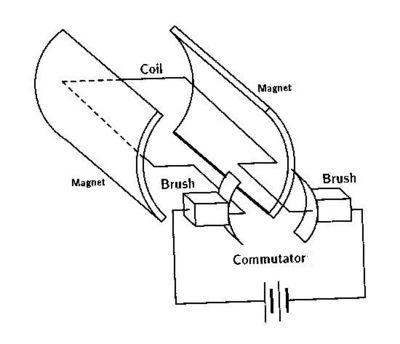
A continuación se muestra un motor de CC simple.

Image Resource Link: mind.ilstu.edu/curriculum/medical_robotics/dcmotor.jpg
Como se mencionó anteriormente, cualquier motor consta de dos partes a saber. estator y rotor. Según la configuración y la construcción, existen tres tipos de motores de CC: motor cepillado, motor sin escobillas y servomotor.
Principio de funcionamiento del motor de CC
Un dispositivo de conversión de energía electromecánica tomará energía eléctrica en la entrada y producirá una energía mecánica en el lado de salida. Hay tres máquinas eléctricas que se utilizan ampliamente para esta tarea: un motor de CC, un motor de inducción o asíncrono y un motor síncrono. El motor de inducción y los motores sincrónicos son motores de CA. En todos los motores, la energía eléctrica se convierte en mecánica cuando se cambia el flujo magnético que une una bobina.
Un motor eléctrico toma energía eléctrica como entrada y la convierte en energía mecánica.
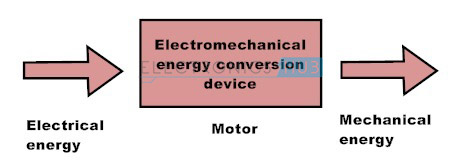
Motor eléctrico
Cuando la energía eléctrica se aplica a un conductor que se coloca perpendicular a la dirección del campo magnético, el resultado de la interacción entre la corriente eléctrica que fluye a través del conductor y el campo magnético es una fuerza. Esta fuerza empuja al conductor en la dirección perpendicular tanto a la corriente como al campo magnético, por lo tanto, la fuerza es de naturaleza mecánica.
El valor de la fuerza se puede calcular si la densidad del campo magnético B, La longitud del conductor L y la corriente que fluye en el conductor I son conocidas.
La fuerza ejercida sobre el conductor viene dada por
F = B × I × L Newtons
La dirección del movimiento del conductor se puede determinar con la ayuda de la Regla de la mano izquierda de Fleming.
La regla de la mano izquierda de Fleming es aplicable a todos motores.
La figura que representa la Regla de la mano izquierda de Fleming se muestra a continuación.
Cuando el conductor que transporta corriente se coloca en un campo magnético, una fuerza actúa sobre el conductor que es perpendicular tanto a las direcciones del campo magnético como a la corriente.
Según la Regla de la mano izquierda de Fleming, el pulgar de la mano izquierda representa la dirección de la fuerza, el dedo índice representa la dirección del campo magnético y el dedo medio representa la dirección de la corriente.
A El motor de CC consiste en dos juegos de bobinas llamados bobinado de armadura y devanado de campo. El devanado de campo se usa para producir el campo magnético. Un conjunto de imanes permanentes también se puede usar para este propósito. Si se usan bobinados de campo, es un electroimán. El devanado de campo es la parte fija del motor o un estator. El devanado de la armadura es parte del rotor del motor. El rotor se coloca dentro del estator. El rotor o la armadura están conectados al circuito externo a través de un conmutador mecánico.
Generalmente, los materiales magnéticos Ferro se utilizan para fabricar tanto estator como rotor separados por un espacio de aire. Los devanados de la bobina dentro del estator están hechos de conexiones en serie o paralelas de número de bobinas. Los devanados de cobre se emplean generalmente para devanados de armadura y de campo.
El principio de funcionamiento de un motor de corriente continua se explica a continuación.
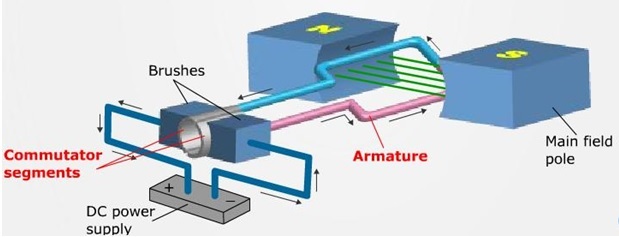
Principio de funcionamiento del motor de CC
Considere una bobina colocada en un campo magnético con una densidad de flujo de B Tesla. Cuando la bobina se alimenta con corriente continua conectándola a un suministro de CC, fluye una corriente I a través de la longitud de la bobina. La corriente eléctrica en la bobina interactúa con el campo magnético y el resultado es el esfuerzo de una fuerza sobre la bobina de acuerdo con la ecuación de fuerza de Lorenz. La fuerza es proporcional a la fuerza del campo magnético y la corriente en el conductor.
El mismo principio se usa en el motor de CC y consiste en varias bobinas que se enrollan en la armadura y se experimentan todas las bobinas la misma fuerza. El resultado de esta fuerza es la rotación de la armadura. La rotación del conductor en el campo magnético dará como resultado un par motor. El flujo magnético que se une con el conductor es diferente en diferentes posiciones de la bobina en el campo magnético y estas causas inducen una fem en la bobina de acuerdo con las leyes de inducción electromagnética de Faradays. Esta fem se conoce como «emf». La dirección de esta fem es opuesta a la tensión de suministro que es responsable de que la corriente fluya en el conductor. Por lo tanto, la cantidad total de corriente que fluye en la armadura es proporcional a la diferencia entre la tensión de alimentación y la fuerza de retroceso.
El equivalente eléctrico de un motor de corriente continua se muestra a continuación.

Circuito equivalente de motor de CC
Un circuito eléctrico equivalente de motor de CC se divide en dos circuitos: circuito de campo y circuito de armadura. El circuito de campo es responsable del campo magnético y se suministra con un voltaje de CC separado Vf. La resistencia y la inductancia del devanado de campo están representadas por Rf y Lf. Como resultado de la tensión, se produce una corriente If en el bobinado y se establece el campo magnético necesario.
En la armadura, se aplica una tensión VT a través de los terminales del motor y fluye una corriente Ia en el circuito de armadura. La resistencia del devanado de la armadura es Ra y la tensión total inducida en la armadura es Eb.
Aplicación de la Ley de Voltaje de Kirchhoff en ambos circuitos,
Vf = Si * Rf
VT = Ia * Ra + Eb
El torque desarrollado en el motor es
T = K * Ia * Φ </p>
Donde k es constante dependiendo de la geometría de la bobina y Φ es flujo magnético.
La potencia eléctrica del motor es Eb * Ia.
La potencia desarrollada que es la potencia convertida a forma mecánica se da a continuación:
P = T * ωn donde ω es la velocidad angular.
Esta es la potencia total que se entrega al voltaje inducido del inducido y
Eb * Ia = T * ωn
Tipos de motores de CC
Los motores de CC se clasifican principalmente en dos tipos en la forma en que se alimenta el rotor. Son motores DC cepillados y motores DC sin escobillas. Como su nombre indica, las escobillas están presentes en el motor de corriente continua cepillado para suministrar la corriente a la armadura giratoria a través del conmutador, mientras que en un motor de corriente continua sin escobillas no necesitan cepillos, ya que utiliza un rotor de imán permanente.
Motor de corriente continua cepillado
En este tipo de motores, el campo magnético se produce al pasar corriente a través de un colector y un cepillo que están dentro el rotor. Por lo tanto, se llaman motores cepillados. Los cepillos están hechos de carbono. Estos pueden ser motores excitados por separado o autoexcitados.
La parte del estator del motor consiste en bobinas conectadas de forma circular de tal forma que se forman los polos norte y sur alternativos requeridos. Esta configuración de la bobina puede ser en serie o en paralelo al devanado de la bobina del rotor formando motores de CC arrollados en serie y motores de CC con derivación en derivación. La armadura o la parte del rotor del motor de CC consta de un conmutador que esencialmente es un conductor portador de corriente conectado en un extremo a los segmentos de cobre que están aislados eléctricamente. La potencia externa se puede conectar al conmutador a través de las escobillas a medida que la armadura gira.
Tipos de motor de corriente continua cepillados
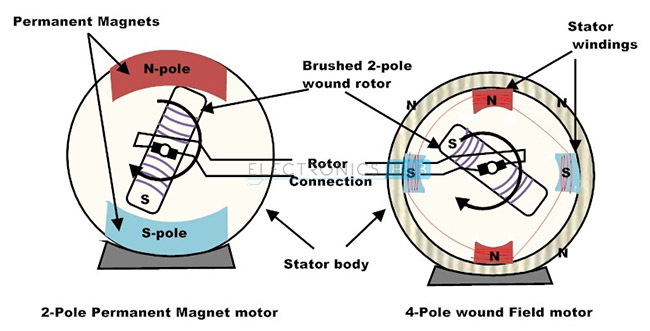
Los motores de corriente continua se clasifican de acuerdo con las conexiones eléctricas del devanado de armadura y el devanado de campo. Diferentes tipos de conexiones dan lugar a diferentes tipos de motores. Los motores de CC se dividen según la generación de campo magnético. Hay tres tipos principales de motores de CC: Imán autónomo, Emocionado y Excitado por separado. En el caso de los motores de tipo imán permanente, se usa un imán potente para generar el campo magnético requerido. En el caso de motores excitados por separado y autoexcitados, se despliega un electroimán en la estructura del estator.
Los motores CC de tipo autoauricular se dividen de nuevo en tres tipos: Shunt Excited, Series Excited y Compound Excited.
Los motores de tipo Emocionado Compuesto se dividen además en Compuesto Acumulativo y Compuesto Diferencial con los tipos de Derivación Larga y Derivación Corta en cada uno de los Compuestos Excitados.
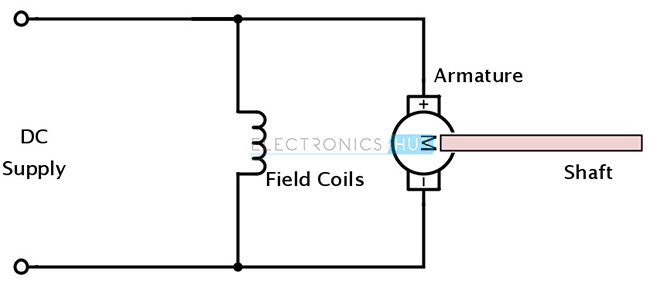
Motores Separadamente Emocionados
Como su nombre lo indica, un el motor de CC excitado por separado utiliza suministros separados para devanado de armadura y devanado de campo. Esto significa que el devanado de armadura y el devanado de campo están eléctricamente separados el uno del otro.
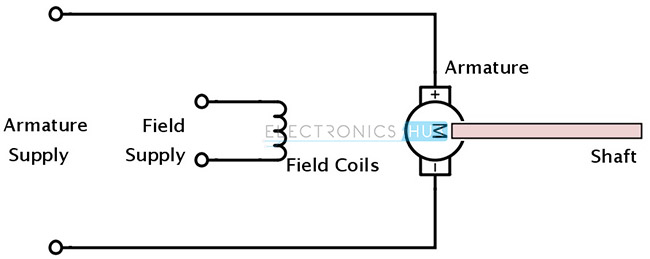
Motores con excitación separada
La corriente de armadura y la corriente de campo no interfieren entre sí ya que las fuentes son diferentes. Pero el poder de entrada total es la suma de los poderes individuales. Si Vf y If son voltaje y corriente correspondientes al circuito de campo magnético y Vt e Ia son voltaje y corriente correspondientes al circuito de armadura, entonces la potencia de entrada total viene dada por Vf * If + Vt * Ia.
Self-Excited Motores
En motores de CC autoexcitados, en lugar de fuentes de tensión separadas, el devanado de campo y el devanado de armadura se conectan a través de la única fuente de suministro. Esta conexión se puede hacer de dos maneras: derivación o paralelo y serie. Por lo tanto, los motores autoexcitados se clasifican de nuevo en motores Shunt Wound DC y motores Serie Wound DC.
Shunt DC Motors: En caso de motores DC en derivación, el campo de bobinado y la armadura el devanado está conectado en paralelo a través del mismo suministro y, por lo tanto, los devanados de campo están expuestos a toda la tensión del terminal. Aunque el suministro es el mismo, la corriente de campo y la corriente de armadura son diferentes. La velocidad de un motor de derivación de CC es constante y no varía con la carga mecánica en la salida.
La estructura del motor de derivación de CC se muestra a continuación.
Shunt DC Motor
El equivalente eléctrico del motor de derivación de CC se muestra a continuación.
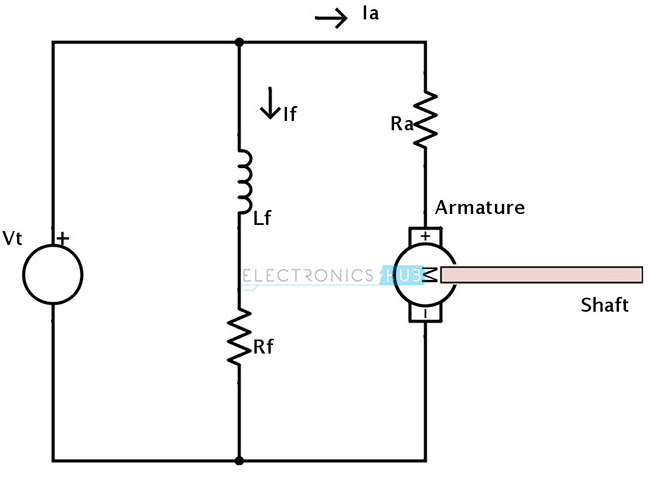
Circuito equivalente del circuito de derivación de CC
Si Eb es la fuerza de retorno del motor, entonces
Vt = Eb + Ia * Ra
Si la constante de la armadura es Ka y la velocidad de su rotación es ω, entonces
Eb = Ka * ω * Φ </p>
Donde Φ es el flujo magnético.
Por lo tanto,
Vt = Ka * ω * Φ + Ia * Ra
La corriente total es It = If + Ia
Por lo tanto, la potencia total es P = Vt * It
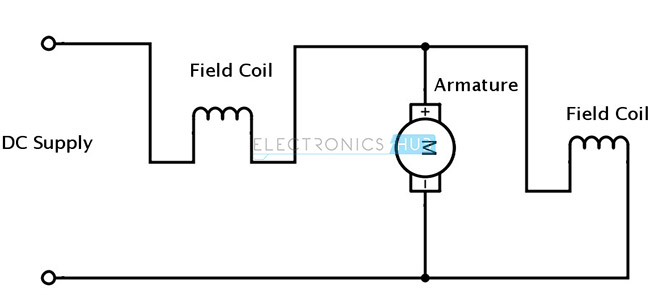
Series Motors: En el caso de motores DC de serie, el campo los devanados y los devanados de armadura están conectados en serie con la fuente de alimentación. Por lo tanto, la misma corriente fluye en el devanado de campo y de inducido.
Un motor de serie devanado también se denomina motor universal, ya que funciona con una fuente de alimentación de CA o de tensión de CC.
Un motor en serie de la serie siempre girará en la misma dirección independientemente de la polaridad de la fuente de voltaje. Esto es porque si cambiamos las polaridades, la polaridad del devanado de la armadura y la dirección del campo magnético se invierten simultáneamente. La velocidad del motor de CC de la serie varía con la carga mecánica.
La representación diagramática de un motor de CC enrollado en serie se muestra a continuación.
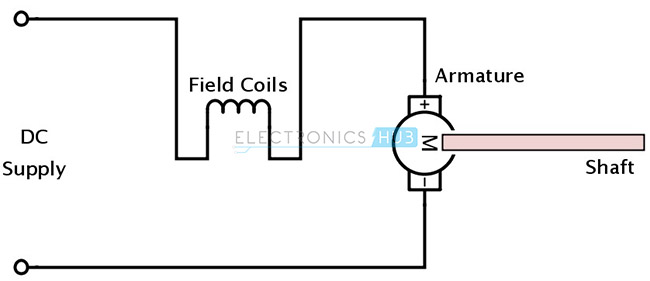
Motor de CC serie
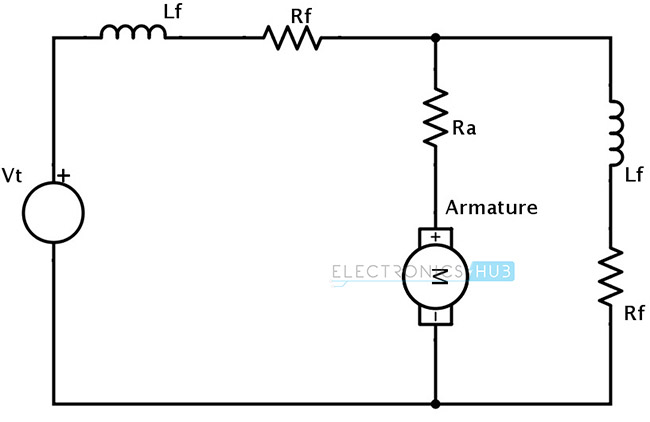
El equivalente eléctrico de un motor de CC en serie se muestra a continuación.
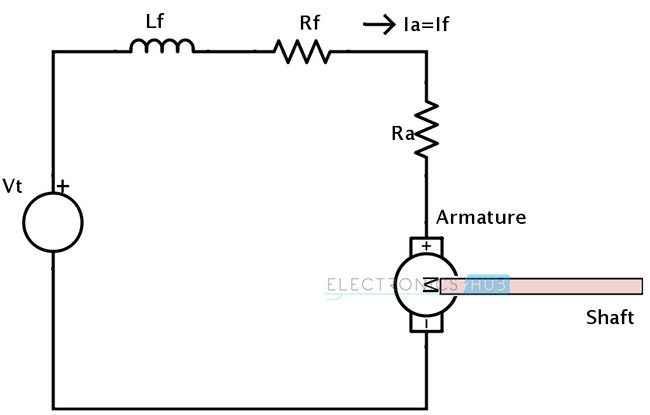
Circuito equivalente de motor de CC serie
Motores compuestos: Los motores de bobinado compuesto utilizan la combinación de bobinados de serie y derivación del campo de derivación. El devanado en serie está conectado en serie con la armadura del motor mientras que el devanado paralelo está conectado en paralelo.
Dado que hay dos circuitos de campo que producen campos magnéticos, los motores de corriente continua compuestos se pueden dividir en dos tipos basados en la orientación del flujo. Esos son motores acumulados de CC combinados y motores diferenciales de CC compuesto.
Si el flujo del campo de derivación ayuda al flujo del campo de la serie, es decir, ambos están en la misma dirección, entonces es un motor de CC compuesto acumulativo. En este caso, el flujo magnético total es la suma de los flujos individuales.
ΦTOTAL = ΦSERIES + ΦSHUNT
Estructura de un compuesto acumulativo DC motores está en la siguiente figura.
Circuito de motor de CC compuesto acumulado
El equivalente eléctrico se muestra a continuación.
Circuito equivalente acumulado de motor de corriente continua
En el caso de motores de corriente continua compuestos, el flujo producido por campo de serie y campo de derivación están en dirección opuesta y el flujo total es la diferencia entre ellos.
ΦTOTAL = ΦSERIES-ΦCAPÍTULO
En este caso, el flujo neto es menor que el flujo original y, por lo tanto, los motores DC de compuestos diferenciales no encuentran muchas aplicaciones prácticas.
Los motores CC combinados y diferenciales pueden ser dividido en dispositivos de derivación larga y de derivación corta basados en la derivación del devanado de campo de derivación.
Si se trata de motores de derivación larga, el devanado de campo de derivación es paralelo tanto a la armadura como a la bobina de campo en serie./p> 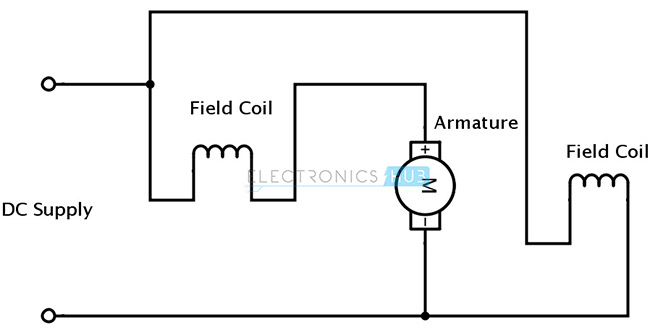
Long Shunt
Si el devanado del campo de derivación es paralelo solo a la armadura, entonces es corto shunt.
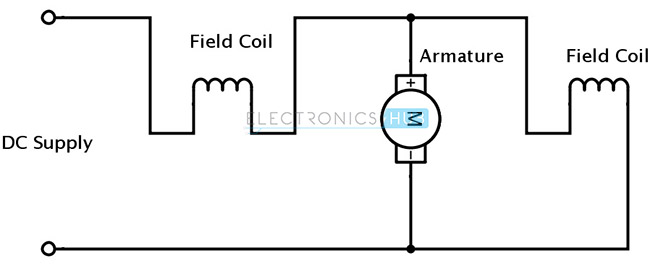
Shunt corto
Motores CC de imán permanente: En el caso de motores de CC de imán permanente, se usa un imán potente para producir el campo magnético. Por lo tanto, un motor de CC de imán permanente consiste únicamente en devanado de inducido.
A continuación, se muestra un motor de CC con imán permanente cepillado.
 Enlace de recursos de imagen: hades.mech.northwestern.edu/images/thumb/c/cf/Motor_Commutators.jpg/400px-Motor_Commutators.jpg
Enlace de recursos de imagen: hades.mech.northwestern.edu/images/thumb/c/cf/Motor_Commutators.jpg/400px-Motor_Commutators.jpg
Los motores de CC cepillados de imán permanente son más pequeños y más económicos que los motores de CC de tipo bobinado del estator. En general, los imanes de tierras raras como Samarium Cobalt o Neodymium Iron Boron se utilizan como imanes en motores de imán permanente de CC, ya que son imanes muy potentes y tienen campos magnéticos elevados.
Las características de velocidad/par de un motor de CC de imán permanente son más lineales que los motores de CC con estator.
La desventaja de un motor de CC cepillado es la aparición de chispas entre el conmutador y las escobillas bajo condiciones de carga pesada. Esto genera una gran cantidad de calor y reduce la vida útil del motor.
DC sin escobillas Motor
Los motores de corriente continua sin escobillas normalmente constan de un rotor de imán permanente y un estator con bobina. Este diseño mediante el uso de imanes permanentes en el rotor elimina la necesidad de cepillos en la parte del rotor. Por lo tanto, a diferencia de los motores DC cepillados, estos tipos no contienen cepillos y, por lo tanto, no se desgastan las escobillas, ya que se genera poca cantidad de calor.
Como no hay escobillas en el motor, debe haber otros medios para detectar la posición angular del rotor. Los sensores de efecto Hall se utilizan para producir las señales de retroalimentación que se requieren para controlar cualquier dispositivo de conmutación de semiconductores. Los motores de CC sin escobillas son más costosos que los motores de CC cepillados y son más eficientes que sus primos cepillados.
DC Servo Motor
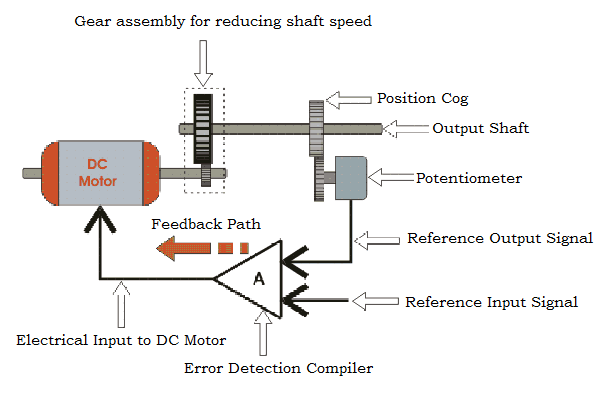
Un pequeño motor de CC girará a alta velocidad, pero su par motor es insuficiente para mover cualquier carga. Un servomotor de CC consta de cuatro partes: un motor de CC normal, una caja de engranajes para control de velocidad, un circuito de control y una unidad de detección de posición. La caja de cambios tomará la entrada de alta velocidad y la convertirá en una velocidad más lenta pero más práctica. La unidad de detección de posición es generalmente un potenciómetro. El circuito de control es un amplificador detector de errores.
En los servomotores de CC, la posición del eje es la realimentación de un circuito de control y, por lo tanto, se utilizan en aplicaciones de circuito cerrado.
El potenciómetro está conectado al eje. Permite que el circuito de control controle la posición del motor. Esta posición se compara con una señal de entrada de referencia por el circuito de control. La salida del circuito de control es retroalimentación al motor. Si existe una falta de coincidencia en la posición actual y la posición de referencia, se genera una señal de error en la salida del amplificador de detección de error. En función de esta señal, el eje gira y va a la ubicación requerida y se detiene.
La mayoría de los servomotores de CC pueden girar hasta 1800 en cualquier dirección. Los servomotores de CC se utilizan en dispositivos controlados a distancia, robótica e incluso en grandes aplicaciones industriales.
Conducir un motor de CC
Un motor de CC puede se enciende o se apaga con la ayuda de transistores, interruptores o relés. La forma más simple de control del motor es el control lineal que utiliza un transistor de unión bipolar que actúa como un interruptor. El propósito de los circuitos de accionamiento es controlar la corriente en los devanados. La velocidad del motor se puede controlar variando la cantidad de corriente de base en el transistor. Si el transistor está en estado activo, entonces el motor gira a la mitad de la velocidad, ya que solo la mitad de la tensión de alimentación va al motor. El motor gira a su velocidad máxima cuando todo el voltaje de suministro va hacia él. Esto sucede cuando el transistor está en saturación.
El siguiente circuito se usa para conducir un motor en una dirección.
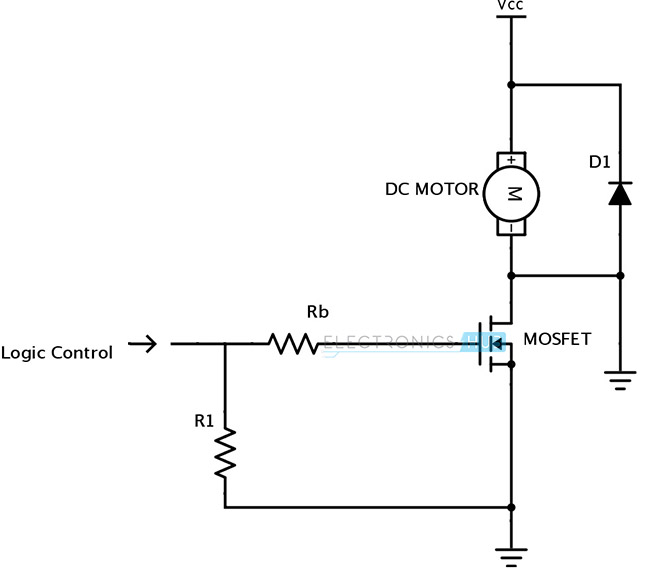
Circuito de conducción del motor uni direccional
En el circuito anterior, las resistencias Rb y R1 son muy importantes. La resistencia Rb se usa para proteger el circuito de control de los picos actuales. La resistencia R1 asegura que el transistor esté APAGADO cuando el pin de entrada está tri-establecido.
La velocidad del motor puede controlarse modulando la tensión de alimentación ya que la velocidad es proporcional al valor medio de la suministro.
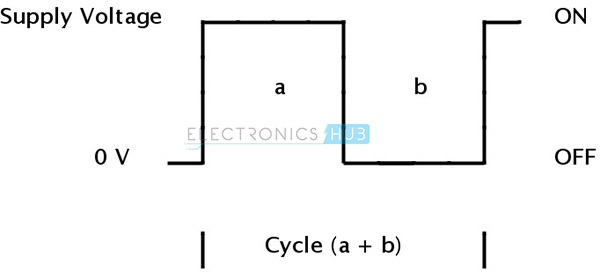
Impulso de suministro
El porcentaje de tiempo de encendido se denomina ciclo de trabajo. El ciclo de trabajo para el pulso anterior se da como β = a/(a + b).
Variando el ciclo de trabajo, es decir, variando el ancho del pulso, se puede variar la velocidad de rotación del motor. Esto se conoce como técnica PWM (modulación de ancho de pulso). La velocidad también se puede variar sin variar el ancho del pulso. Esto se logra variando la frecuencia del pulso. Esto se llama PFM (modulación de frecuencia de pulso).
Cambio de la dirección del motor de CC: la desventaja del circuito de conducción mencionado anteriormente es que es unidireccional, es decir, el motor siempre gira en una sola dirección. Para cambiar la dirección de rotación del motor, la polaridad del suministro debe invertirse. Para lograr esto, se pueden usar diferentes interruptores.
La primera conexión es usando un interruptor DPDT (doble polo, doble tiro).
La conexión se muestra a continuación.
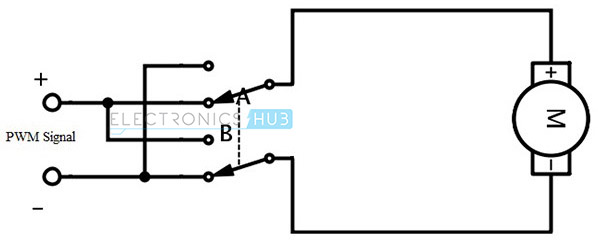
DPDT Cambiar
Cuando el interruptor está en la posición A, el motor gira hacia adelante. Cuando los terminales del motor están conectados al interruptor en la posición B, la dirección se invierte.
La segunda conexión utiliza cuatro interruptores SPST (Single Post, Single Throw).
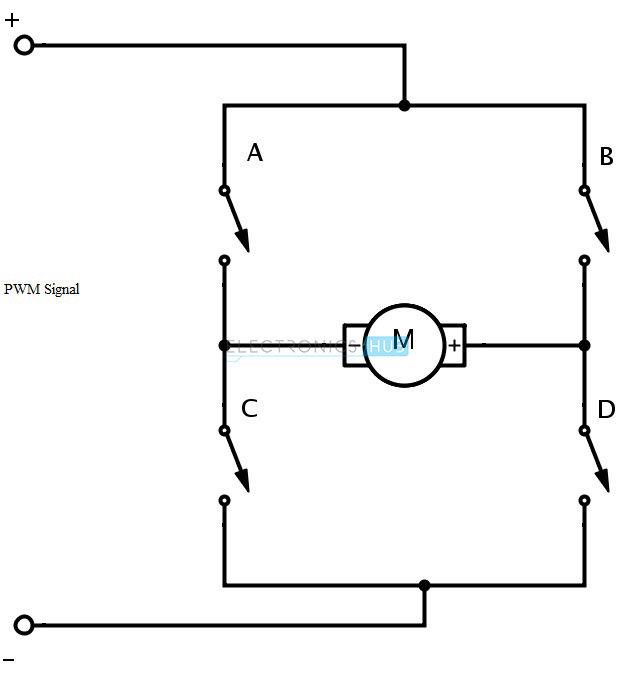
Conmutador SPST
Mediante la combinación de diferentes conmutadores, se pueden lograr diferentes funcionalidades.
Las combinaciones y sus respectivas operaciones son las siguientes.
A + D -Forward Direction
B + C-Reverse Direction
A + B -Stop and Brake
C + D -Stop and Brake
All OFF-Stopped
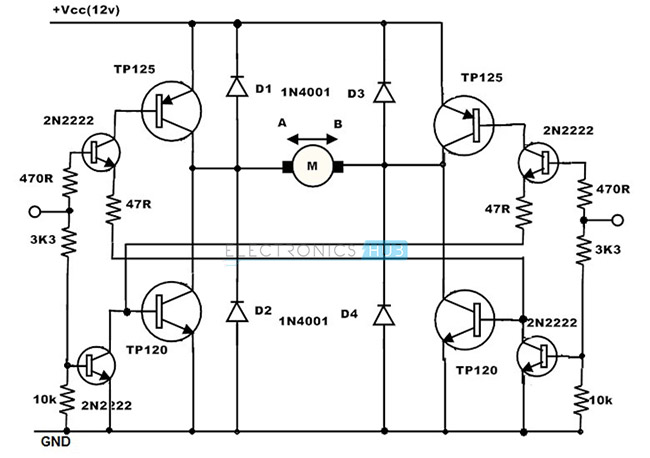
H – Bridge Motor Driver
In order to achieve a better bi – directional control of a DC motor, a circuit called an H – bridge is required. The name H – bridge is given for its schematic appearance with respect to the position of the motor on the center bar. This circuit can be used to move current in either direction through the windings of a motor.
The circuit of an H – bridge DC motor driver is shown below.
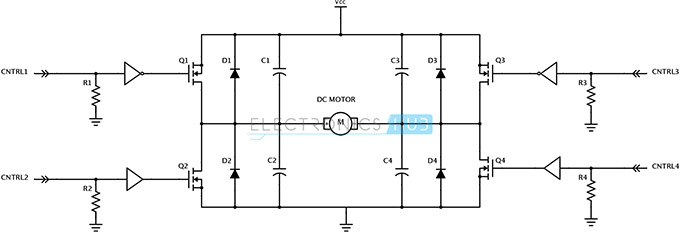
H Bridge Driving Circuit
The control signal CNTRL 1, CNTRL 2, CNTRL 3 and CNTRL 4 are used to switch ON and OFF the transistors Q1, Q2, Q3 and Q4 respectively.

The operation is self-explanatory. One important consideration that must be taken into account is that all the FETs must be in OFF state when the inputs are unpredictable, so that the transistors on each half of the H-Bridge will not turn on at the same time. Hence, the pull down resistor for each transistor is used.
Another circuit for H – Bridge implementation is shown below.
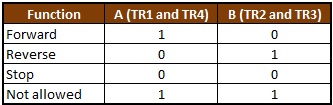
L293D Motor Driver IC
L293D IC is a motor driver IC that works on the concept of H – bridge. This IC allows the motor to drive in both the directions. L293D IC is a 16 pin device with two sets of inputs and outputs. Hence it is possible to control two DC motors with a single IC.
The pin diagram of L293D IC is as below.
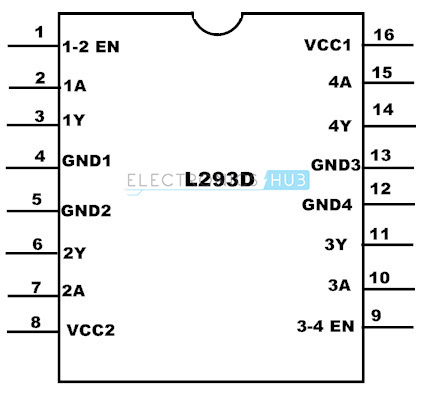 The pins 2, 7 and 10, 15 are the control signals which are used to control the rotation of the motors.
The pins 2, 7 and 10, 15 are the control signals which are used to control the rotation of the motors.
For motor 1,
Pin 2 = logic 1 and pin 7 = logic 0–forward direction
Pin 2 = logic 0 and pin 7 = logic 1–reverse direction
For other combinations, there is no rotation.
Similarly for motor 2,
Pin 10 = logic 1 and pin 15 = logic 0–forward direction
Pin 10 = logic 0 and pin 15 = logic 1–reverse direction.
The circuit for controlling two motors using L293D motor driver IC is shown below.
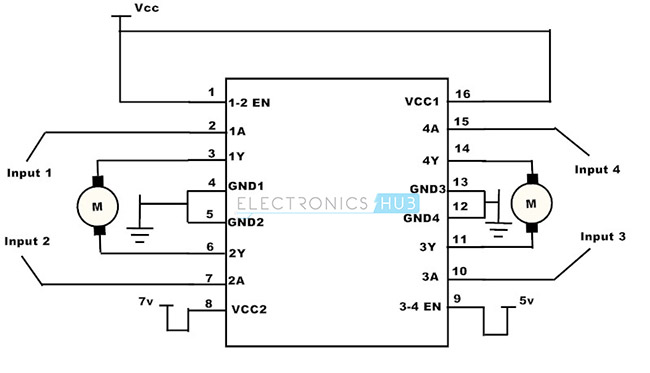 The voltage supply VCC1 is used for the internal operations i.e. to activate signals or to enable or disable. To drive the motor, the supply VCC2 is used. Generally VCC1 = 5V and VCC2 = 9 or 12 V.
The voltage supply VCC1 is used for the internal operations i.e. to activate signals or to enable or disable. To drive the motor, the supply VCC2 is used. Generally VCC1 = 5V and VCC2 = 9 or 12 V.